

Description
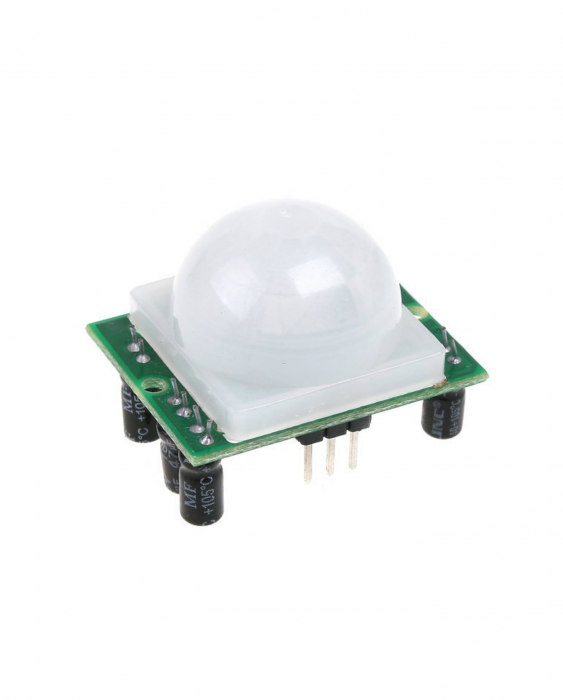
- The PIR sensor itself has two slots in it, each slot is made of a special material that is sensitive to IR.
- When the sensor is idle, both slots detect the same amount of IR, the ambient amount radiated from the room or walls or outdoors.
- When a warm body like a human or animal passes by, it first intercepts one half of the PIR sensor, which causes a positive differential change between the two halves. When the warm body leaves the sensing area, the reverse happens, whereby the sensor generates a negative differential change. These change pulses are what is detected
- The IR sensor itself is housed in a hermetically sealed metal can to improve noise immunity.
There is a window made of IR-transmissive material (typically coated silicon since that is very easy to come by) that protects the sensing element. Behind the window are the two balanced sensors
Features:
- Sensitive element area of 2.0 × 1.0mm2
- Silicon substrate material
- Substrate thickness 0.5mm
- Wavelength 7-14μm
- Average transmittance of> 75%
- Output signal> 2.5V (420 ° k blackbody modulation frequency 0.3-3.0Hz 1Hz bandwidth of 72.5db gain)
- Noise <200mV (mVp-p) (25 °C)
- Balance <20%
- Operating voltage 2.2-15V
- Operating Current 8.5-24μA (VD = 10V, Rs = 47kΩ, 25 °C)
- Source voltage of 0.4-1.1V (VD = 10V, Rs = 47kΩ, 25 °C)
- Operating temperature -20 °C – +70 °C
- Storage temperature -35 °C – +80 °C
- Field of view 139 ° × 126 °



Robo Admin T –
great item!